A lot of MATLAB
Serial Robots

Simple cube stacking exercise using a pneumatic gripper tool
In this course I dived deeper into full forward, inverse (analytical, geometric, and numerical), and velocity kinematics of a 6-DOF robot arms. I also learned about the Jacobian, and how to use it to detect an approaching singularity. All of this I coded in various forms in MATLAB. The laboratory exercises consisted of automation basics, PLC, and an industrial robot arm operation. With prior internship experience at Stäubli Robotics, I found the tasks easy. As a teaching assistant in the machine shops, I channeled my inner mentor and guided my three teammates through the exercises.
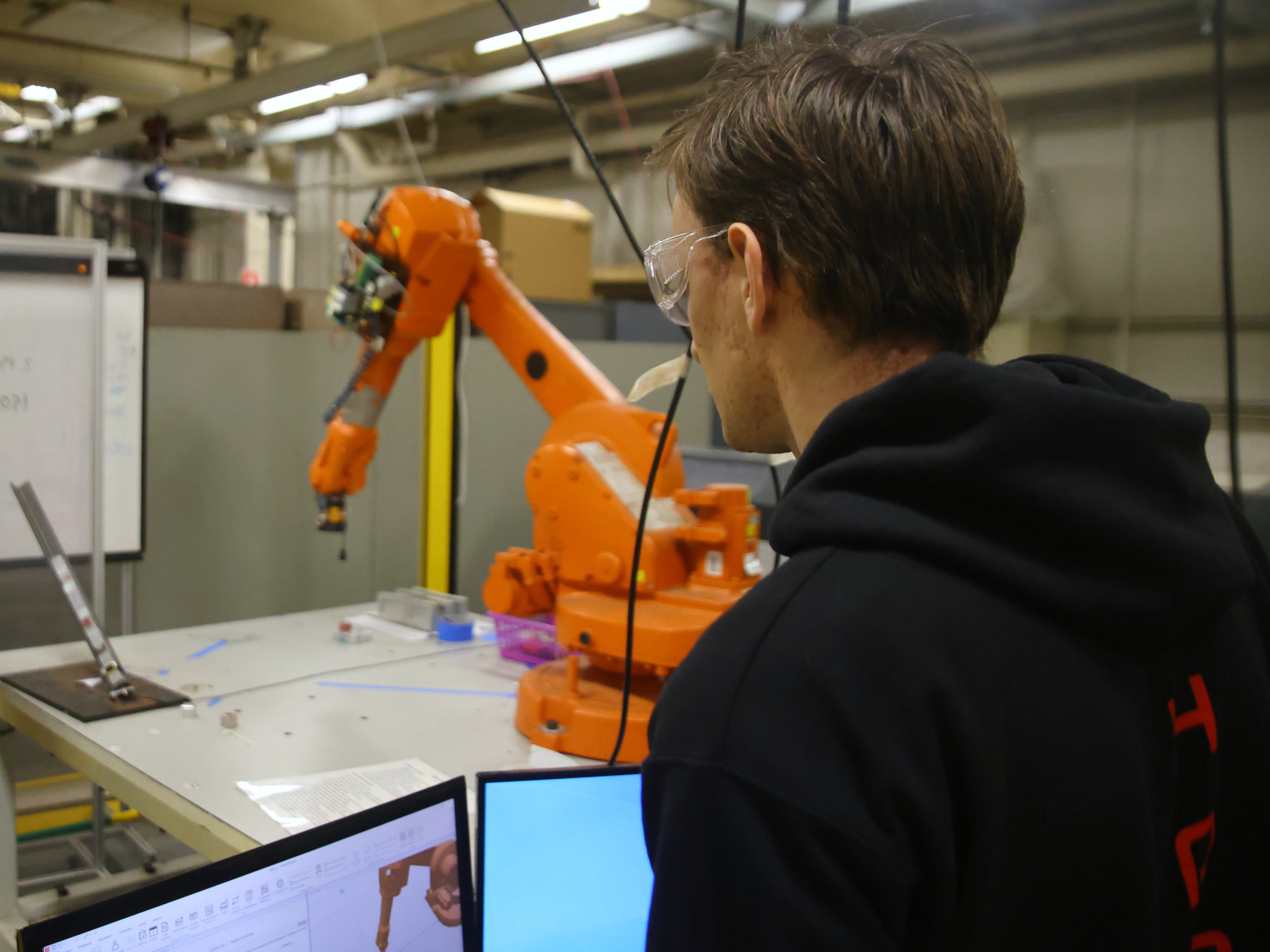
Physical and virtual workspace are always considered
My team had a great time
Parallel Robots
The majority of the course focused on delta robots and the Gough–Stewart platform, which I simulated and visualized using MATLAB. My work primarily centered on the mathematical control stage, reaching the point of successful virtual robot movement simulation, while physical constraints and actuator choices were not within the scope of this course nor my time availability (although I could pick them given a couple days though).
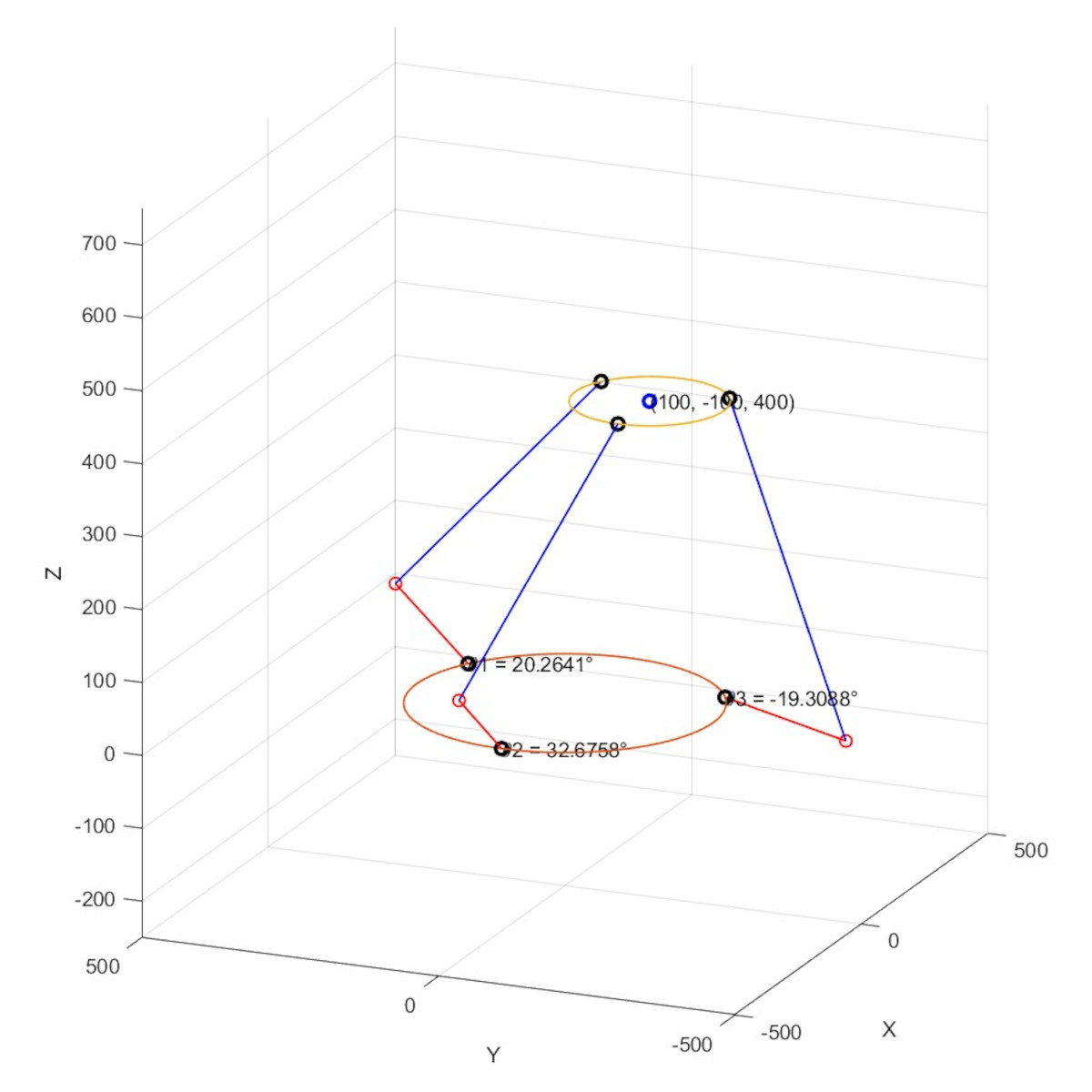
My MATLAB visualization of a delta robot at a given position