Robotics Engineering Class II
Sensors and Communication
In this course we delved into the intricate world of sensors, feedback systems, decision processes, and inter-robot communication. We used all kinds of sensors, from simple IR and ultrasonic sensors to a camera with computer vision. As for the communication, we explored the UART, SPI and I2C protocols.

My Romi camera cyclops
In a team of three, we took on an exciting project: designing and building three small robots capable of escaping the maze without our intervention. Each robot had a unique task: the first one was all about climbing a ramp and reading data from an AprilTag, while the second was a pro at following the wall before locking onto an infra-red beacon and pressing a button that uncovered the AprilTag. The third robot specialized in getting to the escape door and transmitting the correct computed code. The secret sauce? They all communicated over WiFi using the MQTT protocol, turning our little robots into a basic hive mind.
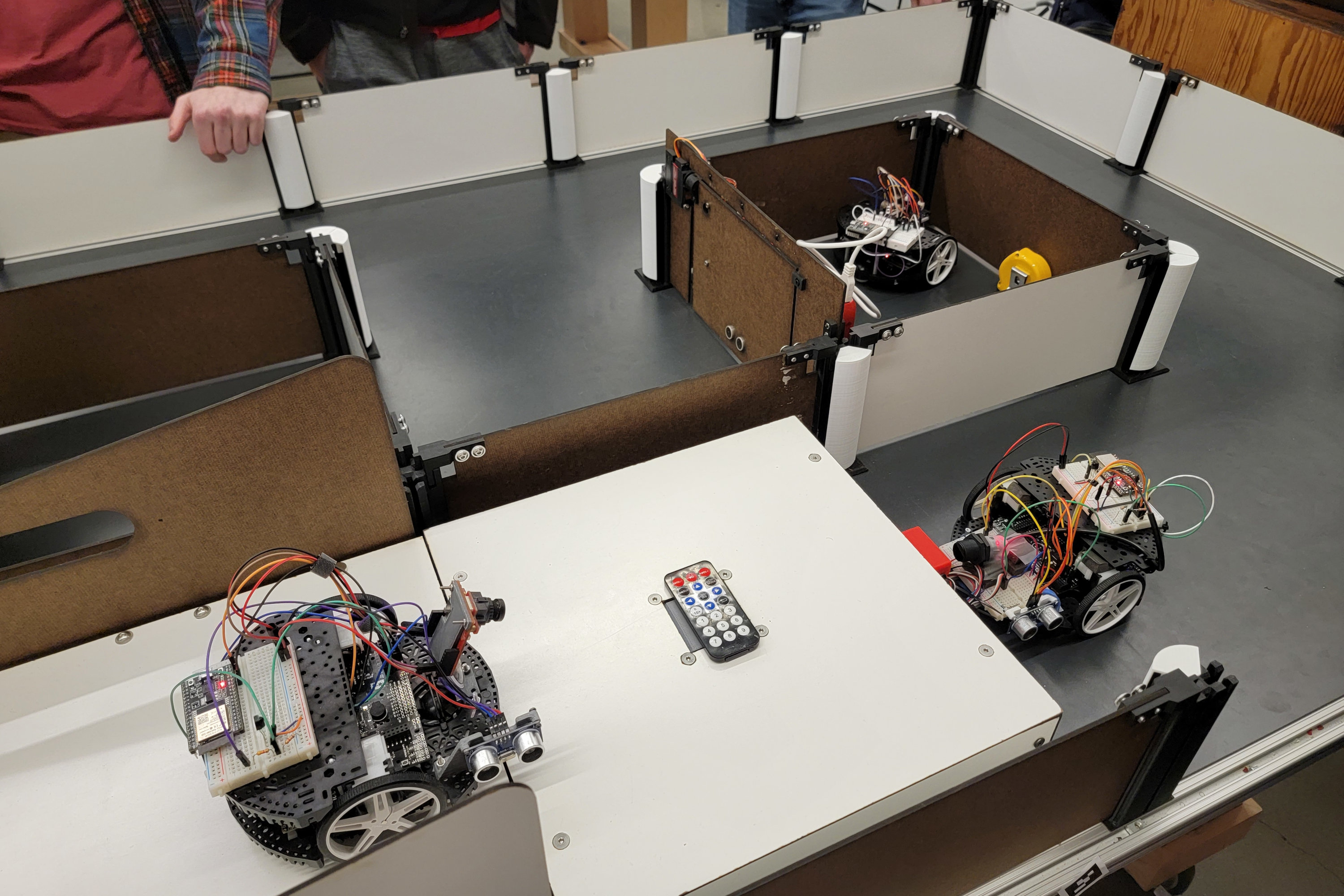
The three Romis on the escape room field
As usual with the robotics classes, it was an insane amount of work and time spent in the lab, but it was also a lot of fun and a great learning experience. I am very proud of our team's work and the final result. We also randomly decided to demo the final version of our project to the professor the evening before, and it worked flawlessly on the second try.

The Awesome Team